Iterative Image Reconstruction of an Aluminium Piston Accelerated on a Graphics Processing Unit
Iterative Image Reconstruction of an Aluminium Piston Accelerated on a Graphics Processing Unit

Abstract
Nowadays, X-ray tomography is increasingly used to control moulded castings of complex shapes. The use of three-dimensional images of moulded products allows not only to perform effective control of the product shape and the presence of defects in them, but also has a fundamental impact on industrial production technologies of mechanical engineering products, closing the technological production cycle into a chain: "automated design – automated production – automatic control". At the leading machine-building enterprises in developed countries, X-ray tomography allowed to bring the development, production preparation and control of shaped castings of various parts of automobile and tractor engines to a qualitatively new level. Production of critical products of modern mechanical engineering (automobile, tractor and aircraft engines, helicopter blades, cooled turbine blades) is often based on the use of modern means of measuring linear dimensions by conventional contact measuring methods. However, such measurements are not possible when evaluating dimensions inside complex moulded parts and prefabricated or non-disassembled joints. It is impossible to measure the wall thickness of a cooled turbine blade of a complex truss with a caliper, as well as, for example, the gap inside a non-assembled valve. Such tasks are solved with the help of industrial X-ray tomography, which is able to perform the necessary measurements without geometric distortions and with a high degree of accuracy in a non-contact interactive mode. The achievable accuracy is comparable to the accuracy of traditional means of contact measurement of external dimensions of industrial products.
1. Введение
В настоящее время большинство используемых на практике методов томографической реконструкции основаны на стандартном методе фильтрованных обратных проекций FBP (см., например,
). В компьютерной томографии набор исходных рентгеновских проекций, не всегда может быть полным, а угол обзора контролируемого объекта не всегда является всесторонним. В таких случаях алгоритмы, основанные на интегральных преобразованиях, уже не работают и используются итерационные методы реконструкции изображений. Результирующее изображение при этом достигается методом последовательных приближений. Мы можем существенно увеличить число возможностей по преодолению ограниченности исходной информации. Нетрудно убедиться в том, что итерационные алгебраические алгоритмы реконструкции изображений во многих случаях дают существенно лучшие результаты по сравнению с традиционными вычислительными алгоритмами, основанными на методах интегральных преобразований. Сами по себе обычные последовательные итерационные алгоритмы вычислительной рентгеновской томографии являются достаточно гибкими и позволяют эффективно использовать различные способы регуляризации процесса реконструкции и использовать априорную информацию об объекте.Нужно отметить, что, несмотря на ряд достоинств, они имеют два существенных недостатка. Первый из них заключается в низкой скорости сходимости итерационного процесса, что заставляет использовать большое количество итераций и приводит в силу этого к тому, что их выполнение на обычных последовательных компьютерах требует значительного времени для достижения удовлетворительного результата. Вторым недостатком является требование наличия очень большого объема оперативной памяти компьютера, предназначенной для хранения вектора восстанавливаемого изображения, набора рентгеновских проекций и проекционной матрицы. Как и для многих вычислительных алгоритмов, предназначенных для работы с большими объемами данных, над итерационными алгоритмами томографии довлеет «проклятие размерности», то есть, это значит, что указанные недостатки невероятно усугубляются с увеличением размерности восстанавливаемого изображения объекта контроля. Мы использовали в этой работе графический процессор для ускорения вычислений.
В области многоядерных процессоров в настоящее время известны графические процессоры (Graphics Processing Unit, GPU) и центральные процессоры (CPU) типа IBM CELL и Intel Core. Последние два десятилетия наиболее динамично развивались GPU. В первую очередь это было обусловлено требованиями современной компьютерной графики к повышению вычислительной мощности графических плат, необходимой для построения изображений в реальном масштабе времени. Поэтому в дальнейшем мы будем использовать GPU в качестве устройства, способного значительно ускорить выполнение процесса реконструкции изображений.
В 1994 году Cabral описал, как можно осуществить компьютерную томографию (основанную на методе фильтрованных обратных проекций) с помощью аппаратной поддержки текстурных отображений на основе использования GPU. Позже, MuellerandYagel использовали ту же самую аппаратную поддержку для итерационной реконструкции (с помощью метода SART), которая использовала текстурное отображение объема для прямого проецирования и обратное текстурное отображение объема для обратного проецирования. Так как обе этих операции можно просто реализовать путем использования стандартных инструкций графической библиотеки OpenGL, которая использует проективные текстуры для обратного проецирования под произвольными углами.
2. Алгоритм алгебраической реконструкции
Данный метод был использован Хаунсфильдом для создания прототипа первого рентгеновского томографа. ART сводит задачу реконструкции изображения по его проекциям к задаче линейной алгебры, т.е. к задаче решения системы линейных алгебраических уравнений. Как правило, это приводит к необходимости решения СЛАУ вида:
где А = (aij) – проекционная матрица, х = (x1,x2,...,xn) – вектор изображения, р = (p1,...,pm) – вектор проекций. Применение итерационного алгебраического алгоритма для задачи вычислительной томографии впервые было описано в 1970 г. в работе
. В этом алгоритме в качестве начального приближения вектора изображений выбирается произвольное значение х(0) ∈ Rn, в предположении, что система уравнений является совместной, (k+1)-я итерация получается из k-ой итерации путем прибавления некоторых добавок к предыдущему приближению. В порядке перебора последовательно рассматривается только один луч, например i-ый, а изменению подвергаются только те компоненты вектора х(k), которые соответствуют пространственным элементам, пересекаемым этим лучом. Величина невязки между измеренным значением рi и рассчитанной (смоделированной) величиной проекции1) начальное приближение х(0) ∈ Rn мы задаем произвольно;
2) k + 1-я итерация рассчитывается по формуле
где параметры релаксации λ(k) представляют собой заранее заданную последовательность чисел, а i = ik = k(modm)+1 т.е. лучи перебираются циклически. Алгоритм ART отличается экономным использованием оперативной памяти, поскольку n – мерный вектор х(k+1) можно запоминать в том же месте оперативной памяти, что и предыдущий вектор х(k).
Таким образом, алгебраический метод сводит задачу восстановления к решению СЛАУ (1), то есть, казалось бы, к стандартной задаче вычислительной линейной алгебры. Однако применительно к проблеме реконструкции изображения данная задача имеет ряд характерных особенностей: размерность системы чрезвычайно велика: как правило, число уравнений и неизвестных порядка 107 – 1010; проекционная матрица А = (aij) является весьма разреженной, поскольку каждый луч пересекает очень незначительное число вокселей, поэтому более 90% ее элементов равно нулю. Матрица А является прямоугольной размера т х п, причем т≠п, и, как правило, т < п. В последнем случае система является недоопределенной и, как следствие, система уравнений (1) является неустойчивой относительно задания начальных данных.
3. Метод алгебраической реконструкции SART
Метод алгебраической реконструкции с одновременными итерациями SART (Simultaneous Algebraic Reconstruction Technique) представляет собой новый метод алгебраической реконструкции. Он был введен в практику Андерсеном и Кэком в 1984 году. Предложенный подход похож на метод ART, однако отличается тем, что одновременно корректируются все лучи, которые попадают на текущую проекцию. Требуемой задачей является восстановление значений xj в n вокселях, принадлежащих области реконструкции, где индекс j пробегает значения от 1 до n. При этом мы используем значеня pi в пикселях с текущим индексом i, принадлежащих проекционным изображениям Pφ. Заметим, что угол φ, характеризует геометрическую ориентацию пары источник-детектор, для которой осуществлялось просвечивание. В уравнении (3), aij является известным весовым коэффициентом, с которым воксель с индексом j вносит свое значение в пиксель i. Алгоритм SART решает систему уравнений итерационным способом. При этом коррекция производится одновременно для всех вокселей, принадлежащих области реконструкции, на текущей итерации с номером k, как указано далее в формуле (3):
В уравнении (3), λ является заранее заданным параметром релаксации, который обычно имеет значение меньшее, чем два 0 < λ < 2. Главное преимущество метода SART по отношению к классическому методу алгебраической реконструкции заключается в том, что он практически полностью устраняет полосовые артефакты, которые свойственны методу ART.
В этой работе для реконструкции изображения поршня был использован метод SART.
Для ускорения процесса реконструкции была использована усовершенствованная технология, на основе отображения текстурных изображений по методу Cabral. В качестве графического ускорителя была использована графическая видеокарта nVIDIA GeForce GTX 1060, имеющая 6GB текстурной памяти. Графические ускорители стали удобными для реализации на них неграфических вычислений, что обеспечено двумя основными факторами: критерием производительность/стоимость и темпами роста производительности графических процессоров, которая удваивалась каждые 6 месяцев. Благодаря использованию массивного параллелизма и векторных процессоров, современные графические устройства способны исполнять многие из приложений, которые ранее были реализованы на высокопроизводительных векторных суперкомпьютерах. Дальнейшие возможности использования графических процессоров для томографии приведены в статье , где авторы показали, как можно использовать новые графические процессоры с плавающей запятой для выполнения как аналитической, так и итеративной реконструкции по данным рентгенографии и функциональной визуализации. Было приведено три популярных алгоритма трехмерной реконструкции:
1) обратное проецирование с фильтром Фельдкампа;
2) метод одновременной алгебраической реконструкции (SART);
3) метод максимального правдоподобия.
4. Экспериментальная реконструкция алюминиевого поршня

Первая и третья серии сверлений различных диаметров

Вторая серия сверлений различных диаметров
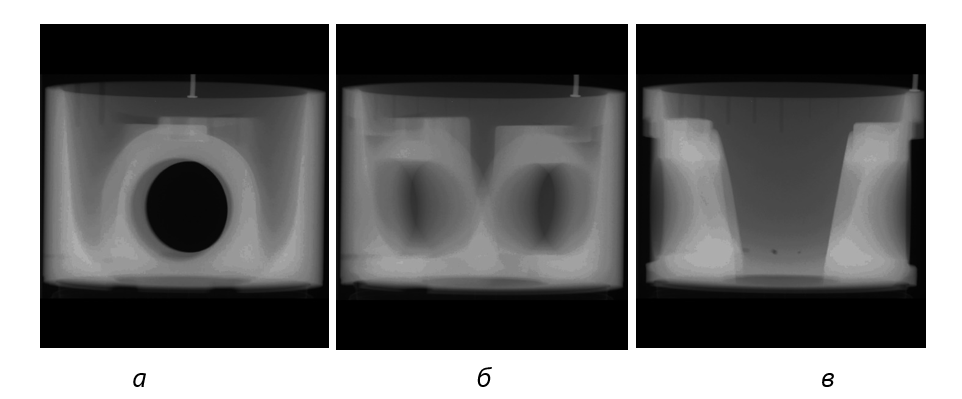
Рентгеновские проекции алюминиевого поршня для различных углов
а – 0о; б – 45о; в – 90о
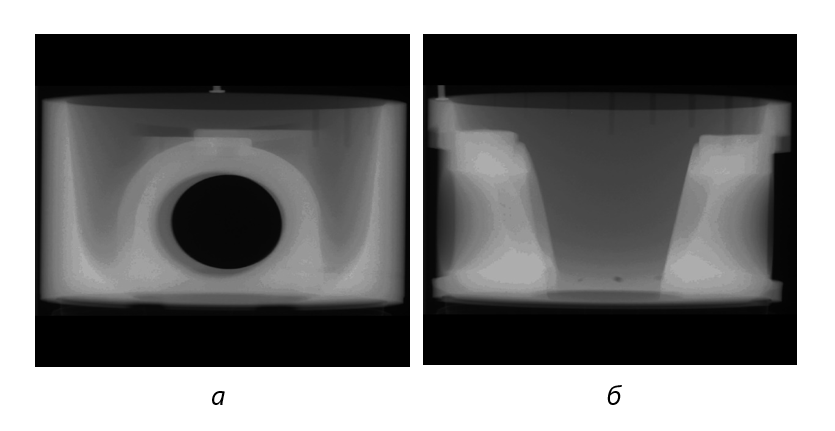
Проекции алюминиевого поршня для различных углов
а – 180о; б – 270о
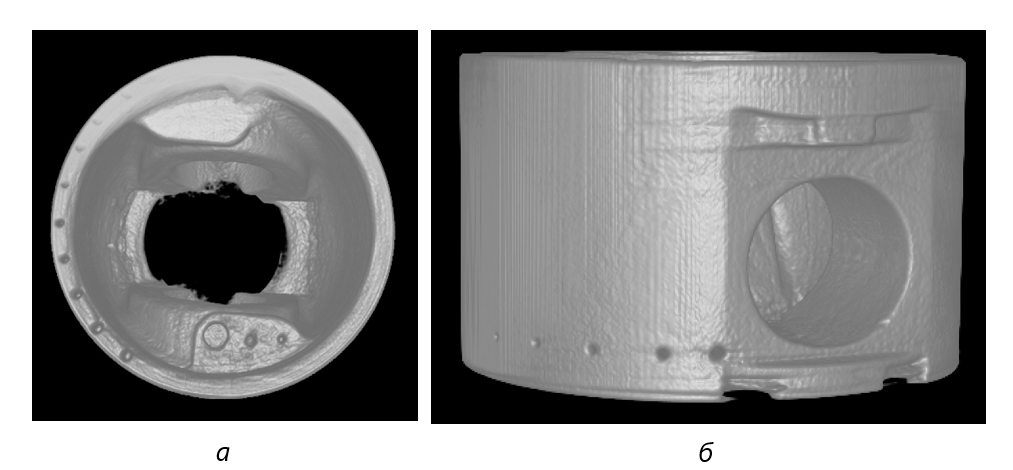
Перспективные виды изображения поршня
а – торцевой вид поршня; б – фронтальный вид
5. Заключение
По результатам исследования можно заключить, что трехмерная рентгеновская томография фасонного машиностроительного литья, как способ визуализации его внутренней структуры, позволяет обнаруживать в литейных изделиях дефекты сплошности, а также измерять в интерактивном режиме с высокой производительностью все размеры, включая и скрытые. В этом смысле она может стать важным фактором управления качеством литья.